Den Hund kann man kaufen. Die Stoppuhr nicht.
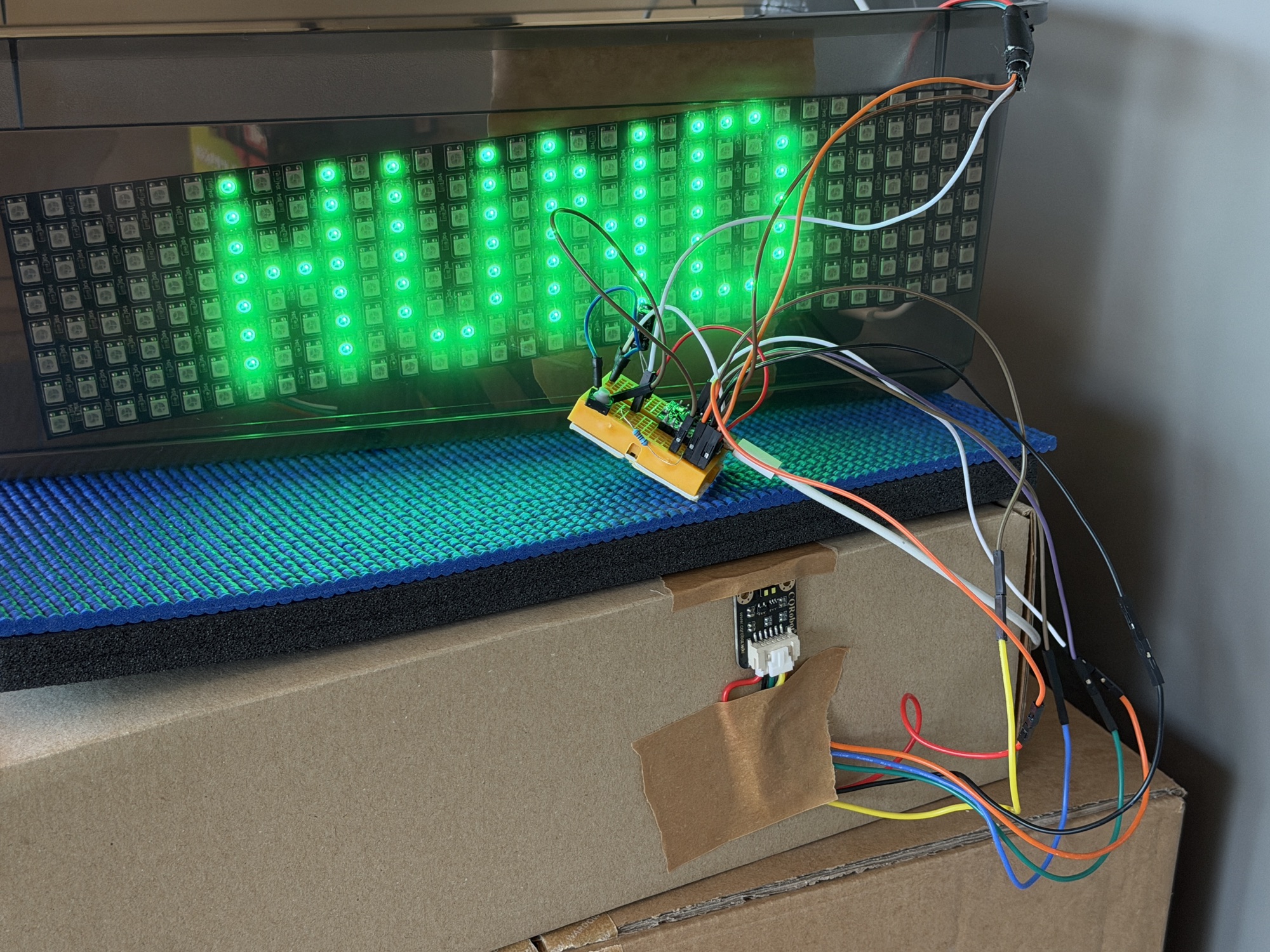
Auf dem Tisch steht ein Roboterhund, der sich selbst im Gleichgewicht hält und mit einem Laser im Kopf den Raum abtastet, um nicht gegen Wände zu laufen – ein fertiges Gerät, das man bestellen kann. Direkt daneben, auf einem Steckbrett – der Platine, auf der man Bauteile zusammensteckt, statt sie zu löten – ein fingerdickes Knäuel aus Kabeln, eine Powerbank und eine Anzeige aus 256 grünen Punkten. Dieses zweite Ding gibt es nirgends zu kaufen, weil niemand eine Stoppuhr baut für „ein Hund läuft zweimal durch dasselbe Tor“. Warum braucht das teure Wunderwerk eine handverdrahtete Begleitung, die in einer Garage entstanden ist? Die Antwort ist der eigentliche Grund, warum diese Station hier steht.
„Den Hund kann man bestellen. Die Stoppuhr dazu gibt es nirgends.“
Ein Hund, der sich selbst auf den Beinen hält
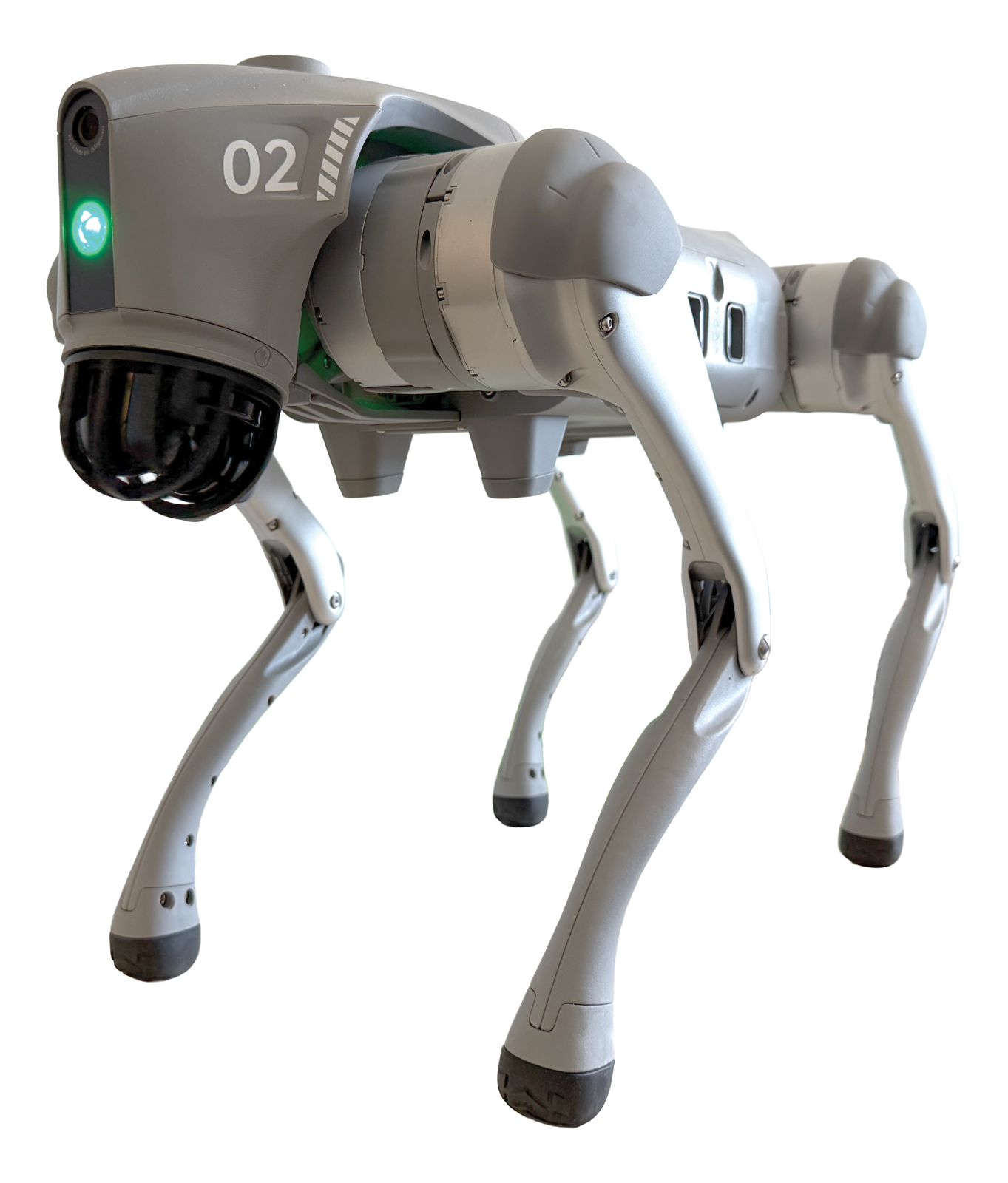
Der Hund ist gekauft – ein ferngesteuerter Unitree Go2. Steuern muss ihn ein Mensch mit der Fernbedienung; allein läuft er den Parcours nicht. Trotzdem steckt in ihm viel mehr, als man auf den ersten Blick sieht, und zwei Dinge daran lohnen sich anzuschauen.
Das erste: Er fällt nicht um. Ein Vierbeiner auf vier dünnen Stelzen müsste eigentlich ständig kippen. Im Inneren sitzt ein winziger Sensor, der wie unser Gleichgewichtssinn im Ohr ständig misst, wie schräg und wie schnell der Körper gerade liegt. Merkt er, dass es zur Seite geht, schieben die Motoren in den Beinen blitzschnell dagegen – viele Male pro Sekunde, lange bevor ein Mensch überhaupt reagieren könnte. Genau deshalb kann der Hund traben, sich nach einem Schubser wieder aufrichten und über kleine Hindernisse steigen. Das Laufen selbst hat er nicht von Hand einprogrammiert bekommen, sondern in unzähligen Simulationen am Computer geübt, bis es saß.
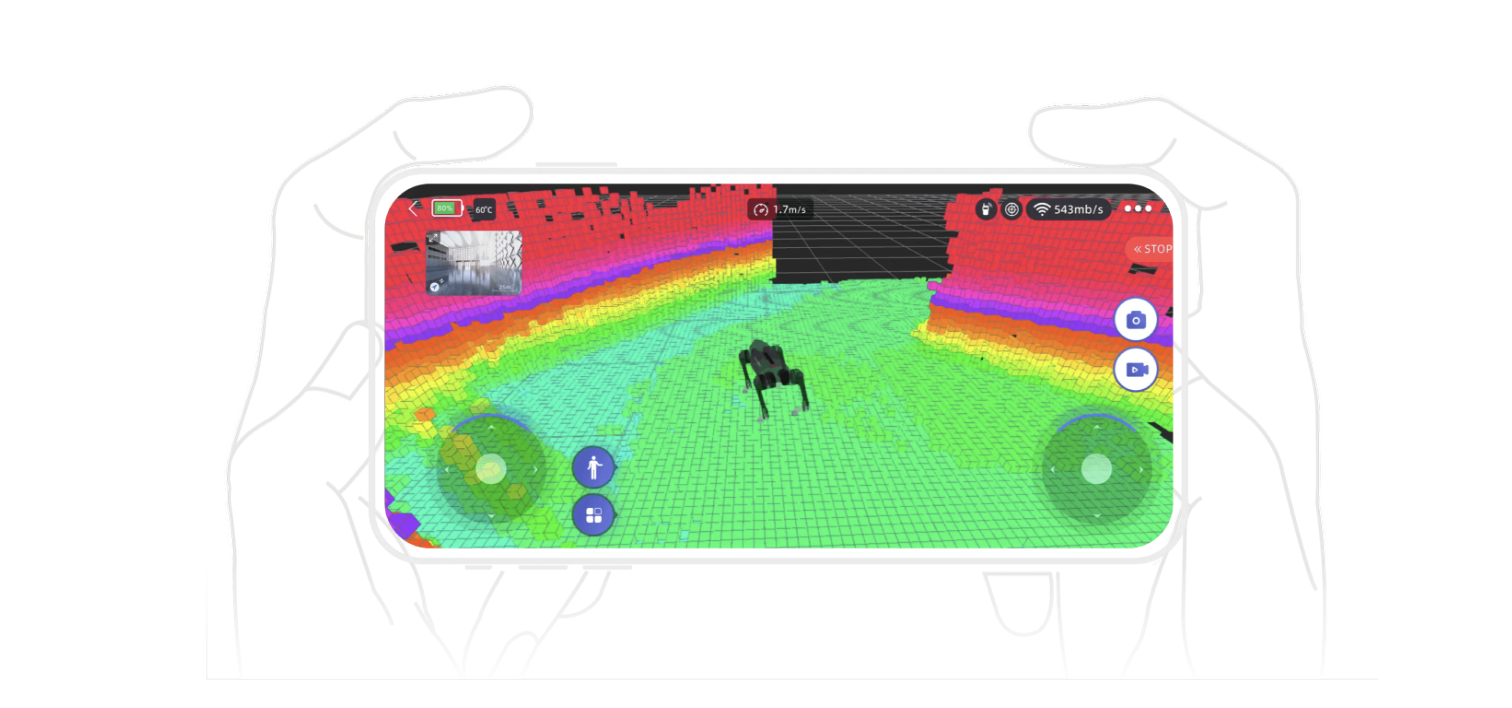
Das zweite sitzt im Kopf, und das müssen wir kurz erklären: ein Laser-Abtaster, ein sogenanntes LiDAR. Er schickt viele tausend Mal pro Sekunde einen kurzen Lichtpuls aus und misst, wie lange er zurückbraucht – aus der Laufzeit ergibt sich der Abstand zum nächsten Gegenstand. Macht man das rundherum, entsteht in Echtzeit ein Abstandsbild der Umgebung. So „sieht“ der Hund, wo eine Wand oder ein Bein steht, und kann nach vorn ausweichen, statt dagegenzulaufen. Dasselbe Prinzip, mit dem selbstfahrende Autos ihre Umgebung erfassen – hier in einem Kopf von der Größe einer Faust.
Für Technik-Interessierte: was im Hund steckt
Mechanik: 12 angetriebene Gelenke, drei pro Bein, mit elektrischen Aktuatoren bis ~45 N·m Spitzendrehmoment. Rund 15 kg, stehend etwa 70×31×40 cm, Rahmen aus Aluminium und Hochleistungskunststoff. Akku 8 Ah bei 28,8 V (~237 Wh, optional 15 Ah), Laufzeit grob 1–2 h. Funk-Fernsteuerung über 30 m. Tempo der Einstiegsversion ~2,5–3,7 m/s (die Plattform schafft im Labor bis 5 m/s).
Gleichgewicht: Eine IMU (Lage- und Beschleunigungssensor) liefert zusammen mit Rückmeldungen aus Gelenken und Füßen die Basis für eine schnelle Regelschleife, die die Aktuatoren viele Male pro Sekunde nachstellt. Die Gangarten – inkl. Selbstaufrichten und Hindernisklettern – stammen aus umfangreichem Training in Simulation, nicht aus handgeschriebenen Bewegungsabläufen.
Wahrnehmung: Im Kopf ein selbstentwickeltes 4D-LiDAR (L1) mit 360°×90°-Sichtfeld, Mindestabstand ~0,05 m und bis zu 21.600 Messungen pro Sekunde; „4D“ meint in Unitrees Lesart 3D-Position plus Reflektivität (Grauwert). Vorn zusätzlich eine Kamera. Ehrlich dazu: Die automatische Hindernisvermeidung wirkt laut Handbuch nur nach vorn, nicht rundum – das LiDAR sieht zwar weit mehr, ausgewichen wird aber vorausschauend in Laufrichtung. Je nach Modell und Charge steckt statt des L1 ein neueres L2 (360°×96°) im Kopf.
„Ein Laser im Kopf, der den Raum abtastet – damit der Hund sieht, wo er hintritt.“
Wozu dann noch etwas bauen?
So beeindruckend der Hund ist – für ein Wettrennen fehlt das Wichtigste: ein unbestechlicher Schiedsrichter für die Zeit. Wer war schneller? Darüber soll niemand streiten, und eine Handy-Stoppuhr, die ein Mensch von Hand drückt, ist beim Start immer ein Wimpernschlag zu spät und beim Ziel auch.
Gebraucht wird also etwas, das den Hund selbst auslösen lässt – ohne Knopfdruck, ohne Diskussion. So eine Stoppuhr gibt es nicht im Laden. Und genau an dieser Stelle fängt Informatik an: Wenn das passende Werkzeug nicht existiert, baut man es sich.
Ein Tor, zwei Strahlbrüche
Die Idee ist denkbar schlicht. Am Start steht ein unsichtbarer Strahl quer über die Bahn. Läuft der Hund durch, unterbricht er ihn – das erste Mal startet die Uhr, das zweite Mal stoppt sie. Kein zweites Gerät am Ziel, keine Verkabelung quer über den Platz: Start und Stopp gehen durch dasselbe eine Tor.
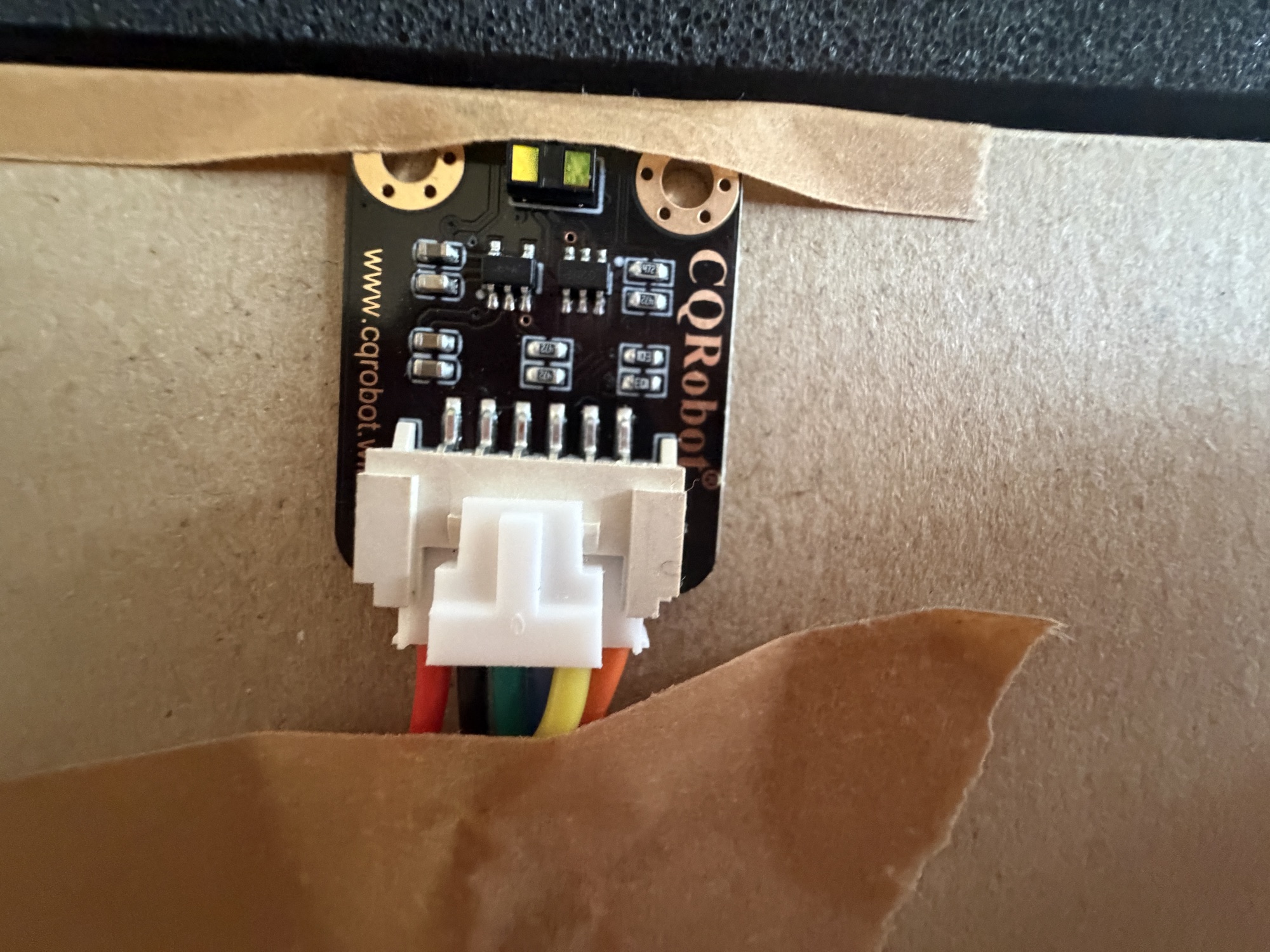
Der „Strahl“ ist ein Trick. Es ist ein kleiner Sensor, der eigentlich Abstände misst, indem er – wie der Laser im Hundekopf, nur viel einfacher – einen Lichtpuls aussendet und dessen Laufzeit nimmt. Steht plötzlich etwas Nahes im Weg, wo eben noch Luft war, gilt der Strahl als unterbrochen. Aus einem Abstandsmesser wird so eine Lichtschranke.
Angezeigt wird die Zeit auf einem Gitter aus 256 grünen Lichtpunkten. Grün nicht aus Laune: Das Auge ist für Grün am empfindlichsten, es wirkt also am hellsten – und zieht dabei am wenigsten Strom, was zählt, wenn alles an einer Powerbank hängt. Die läuft über USB-C, nichts flackert, nichts wackelt, und das Ganze steht einfach im offenen Durchgang von Haus WE5 (An der Weberei 5).
Auch die Anzeige ist eine bewusste Wahl: Zehntelsekunden, keine Hundertstel. Nicht aus Bequemlichkeit – der Sensor ist schlicht nicht genauer als ein paar Hundertstel. Hundertstel anzuzeigen, die das Gerät gar nicht sicher erfasst, wäre vorgetäuschte Präzision.
Was noch wackelt
Der Prototyp läuft – aber er hat eine Macke. Zuverlässig misst der Sensor nur bei einem schmalen Tor, unter zwei Metern Breite; wird die Bahn breiter, verliert er den Hund. Das Reizvolle an ihm war ja gerade, dass er mit demselben Trick „sieht“ wie der Hund – und dass er ohnehin schon herumlag. Etwas aus dem zu bauen, was eh da ist, hat seinen eigenen Charme.
Als Rückversicherung ist eine klassische Infrarot-Lichtschranke bestellt, ein Sender und ein Empfänger gegenüber wie an einer Garagentür – vermutlich zuverlässiger und ehrlich gesagt langweiliger. Ob der umgebaute Abstandssensor bis zum 26. Juni durchhält oder am Ende doch die brave Lichtschranke ran muss, ist offen. Das wird knapp.
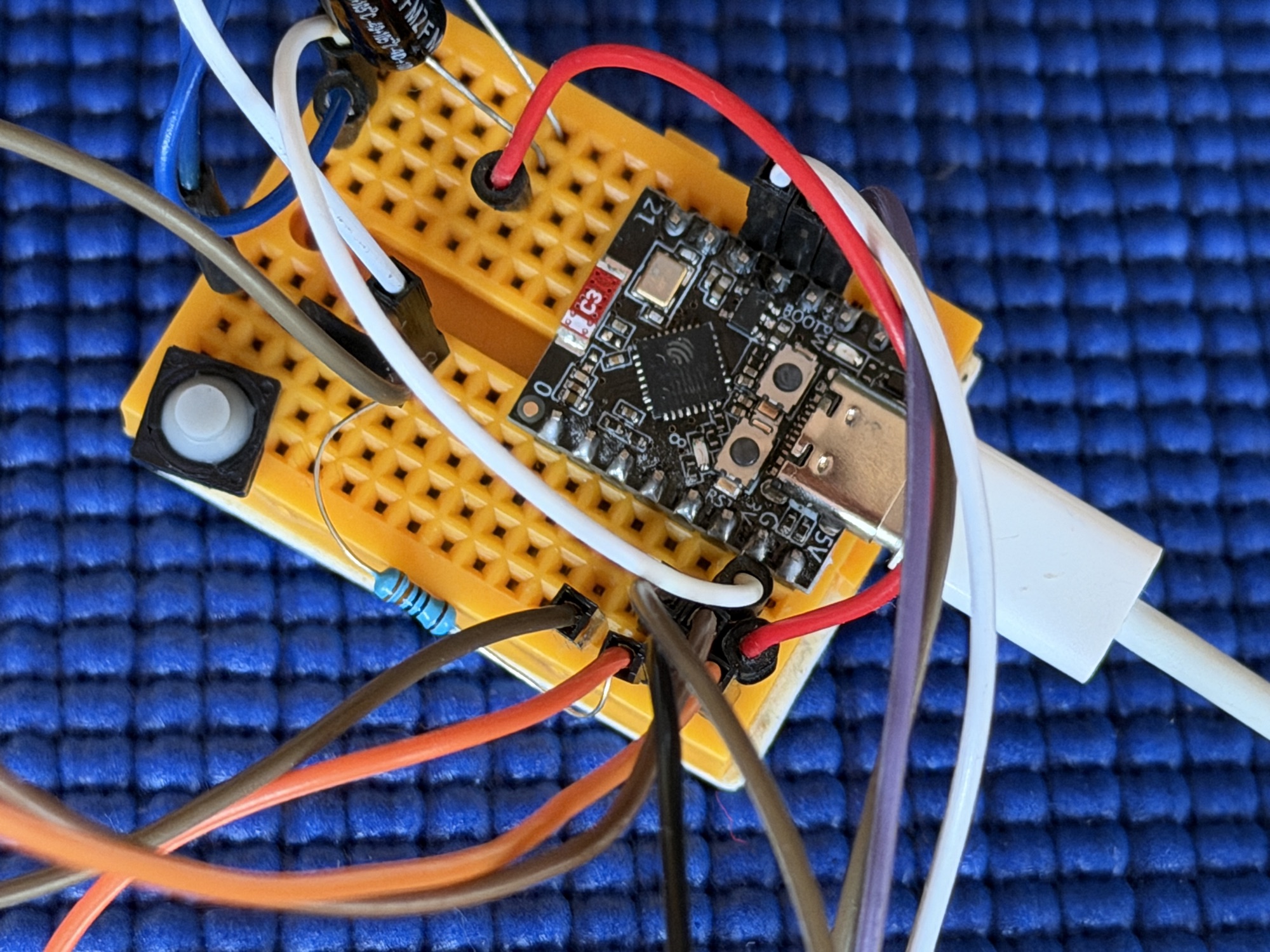
Für Technik-Interessierte: was im Timer steckt
Hardware: ein ESP32-C3 SuperMini, versorgt aus einer USB-C-Powerbank. Anzeige: eine 32×8-WS2812-Matrix, durchgängig grün (Empfindlichkeitsmaximum des Auges bei ~555 nm, geringerer Strom als Weiß; ein FastLED-Power-Cap deckelt den Strom hart ab). Als „Strahl“ ein VL53L1X-ToF-Sensor über I²C (400 kHz), VCC an 3,3 V, weil der Logikpegel der Versorgung folgt. Gemessen wird nur in den Mess-Zuständen, um Strom zu sparen.
Erkennung: zwei Reichweiten-Modi (Short ~1,3 m / Long) und zwei Erkennungs-Modi – PRESENCE ohne feste Rückwand (Ziel näher als die Schwelle = Bruch) und BASELINE mit gelerntem Leerabstand (deutliches Unterschreiten = Bruch), jeweils mit etwas Spielraum, damit ein zittriger Messwert nicht sofort als Bruch durchgeht. Ein Zustandsautomat wird über einen einzigen Taster bedient (kurz/lang). Ein Tor, zwei Strahlbrüche für Start und Stopp; nach jedem Auslösen eine kurze Sperre und eine Mindestlaufzeit, damit ein einzelner Durchlauf nicht doppelt zählt.
Bestenliste & Zeit: Gültige Läufe werden gespeichert und überstehen auch das Ausschalten – als rollende Liste der letzten 50 Läufe. Der Rang ist die Zahl der gerade gespeicherten, strikt schnelleren Läufe plus eins, immer nur gegen diese ≤50; eine getrennte Allzeit-Liste gibt es nicht. Wichtig dabei: Sobald mehr als 50 Läufe zusammenkommen, rutscht der älteste hinten heraus – auch wenn er ganz oben stand. Über den Tag wird oben also wieder ein Platz frei. Zur Genauigkeit: Der Quarz geht um ~±20 ppm falsch, das sind ~5 ms über vier Minuten – weit unter der 100-ms-Anzeige. Der größere Fehler ist, dass der Sensor den Bruch jedes Mal ein paar Hundertstel früher oder später meldet; diese Streuung steckt in jedem einzelnen Auslösen und wächst nicht mit der Laufdauer.
Konkret entstand die Firmware mit Claude Code und PlatformIO.
„Zehntelsekunden, keine Hundertstel. Mehr gibt der Sensor nicht her – also zeigen wir auch nicht mehr.“
Man baut sich seine Welt
Das ist der eigentliche Punkt dieser Station. Nicht der teure Hund – den hat, wer das Geld hat. Sondern das unscheinbare Ding daneben. Ein Mikrocontroller für ein paar Euro, eine Handvoll Bauteile, etwas Code – und du baust dir ein Gerät, das genau eine Aufgabe löst, die sonst niemand löst, und das es so nicht zu kaufen gibt.
Du musst die Welt nicht nehmen, wie sie im Regal liegt. Fehlt dir das Werkzeug, baust du es dir. Mit Informatik und ein paar Elektronikteilen kommt man erstaunlich weit.
Und die Hürde dafür war nie niedriger. Der Code für diesen Timer entstand nicht Zeile für Zeile von Hand, sondern beim Chatten mit einem KI-Coding-Werkzeug: Man beschreibt, was man will, bekommt Code zurück und prüft, verwirft, schärft nach. Was die Maschine einem dabei nicht abnimmt, ist die Idee – ein Tor statt zwei, lieber eine ehrliche Stelle weniger anzeigen als eine vorgetäuschte, der Stromhunger muss zur Powerbank passen. Diese Entscheidungen bleiben bei dir, und genau sie sind die Informatik; das Tippen darf der Computer übernehmen. Dieses Gefühl wollen wir am Stand weitergeben.
„Du musst die Welt nicht nehmen, wie sie im Regal liegt. Fehlt dir das Werkzeug, baust du es dir.“
Am 26. Juni steht beides live am Stand: der Hund und die selbstgebaute Uhr. Du übernimmst die Fernbedienung, schickst den Hund durch den Parcours und liest deine Zeit von der grünen Anzeige ab. Wer es – und sei es nur für den Moment – in die Top 3 der Bestenliste schafft, bekommt ein kleines Geschenk mit nach Hause.
Weil immer nur die letzten Läufe zählen, wird ganz oben über den Tag immer wieder ein Platz frei. Beste Gelegenheit, es selbst zu versuchen.
Selbst durch den Parcours
Am 26. Juni am Stand: Hund steuern, Zeit jagen, in die Top 3 kommen – und ein Geschenk mitnehmen. Wer mag, schaut Hund und Timer vorher direkt über die Schulter.